Much of our ASW tactics research revolved around submarine operations
beneath the polar ice cap, where airplanes and sonobouys couldn't detect
them. This shows the USS Trepang (SSN 674) surfacing through a
thin layer of polar ice. The subs employed various techniques to find
thin ice for easy surfacing. Note the sails turned perpendicular
to protrude through the ice.

North Pole rendezvous of the American submarines Archerfish (SSN 678)
(top), Ray (SSN 653) (center) and Hawkbill (SSN 666) (bottom) on May
6, 1986. A major research emphasis in those days was operation
and detection of submarines beneath the polar ice cap.

Another low level oblique view of the Hawkbill, Ray and Archerfish just
after they surfaced on the North Pole, snapped from one of our P-3’s.

A nuclear
powered submarine in drydock. This was taken at the Sub Base at Pearl
Harbor in June 1985. Note the canvas cover over the sonar dome that
lies beneath the sub’s rounded bow.

The
propulsion screws on American subs are classified, but this unclassified
image of a 7-bladed screw for a Japanese sub gives an indication of
the complex curvature, intended to minimize cavitation at high rpm’s.
The screw’s fabrication process is even classified. These
enormous screws can propel subs at submerged speeds of up to 40 knots.

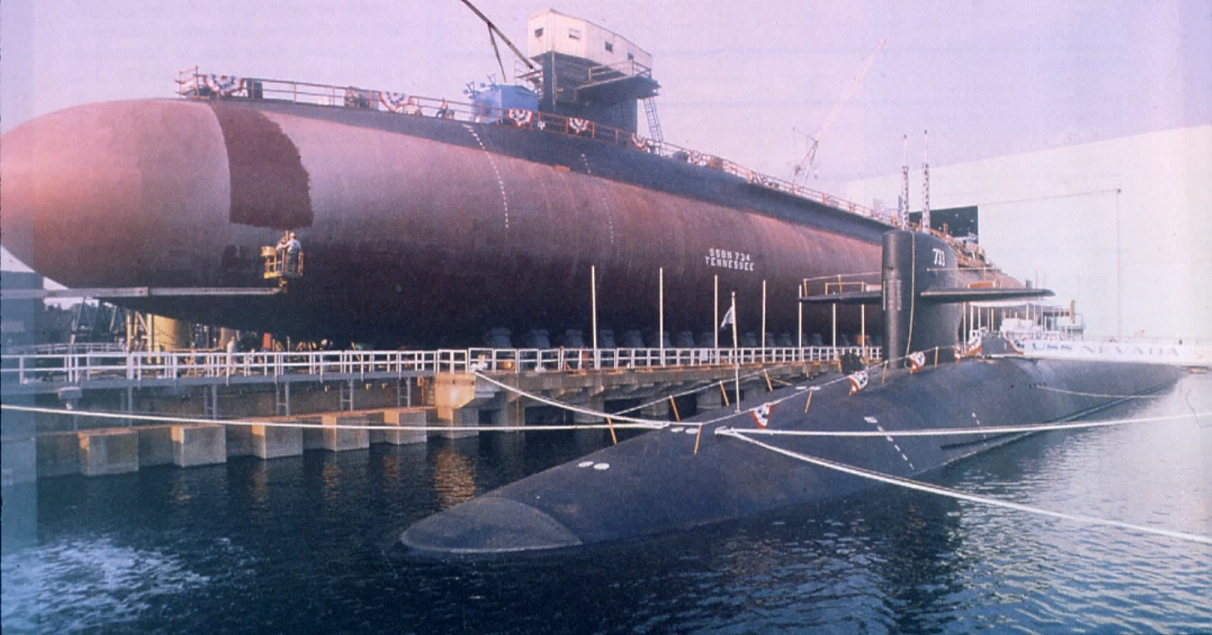
This
shows a pair of Trident ballistic missile subs of the Ohio Class: the
USS Nevada (SSBN-733) in the water and the USS Tennessee (SSBN-734)
on the builder’s ways. These are our largest subs, displacing
about 20,000 tons. They are also some of quietest subs.

Submarines carry all kinds of extendable devices in their sail which
allow them to sense above the ocean's surface. This shows a deployed
periscope (on left) and other electronic surveillance and communications
probes. We could easily detect periscopes with our APS-115 radar,
but we had much better results tracking subs passively, from over-the-horizon.

Submarines were the object of most of our attention during the Cold
War. I ended up riding a dozen different subs on various exercises
where our airborne ASW forces tried to "find" them.
I was more impressed with sub crews than any other cadre of our military
while serving in the armed forces. In a real war, our subs would
probably sink everything in sight.

This shows a Stalwart class SURTASS ship off Waikiki. SURTASS
is an acronym for Surveillance Towed Array Sensor Systems. They tow
long hydrophone arrays, like submarines. It was developed and
deployed in the early 1980s as the mobile, tactical arm of the Integrated
Undersea Surveillance System, providing mobile detection, tracking,
and reporting of submarine contacts at long range. All of our
best cuing and ASW analyses seemed to come from this program.

On one occasion my delivery to the submarine was more dramatic than
the others, coming aboard via helicopter with other vertical replenishment
materials.

Submarine executing emergency surfacing by blowing its ballast tanks.
It is an unforgettable experience aboard the sub.

I learned invaluable information about ASW tactics by serving aboard
submarines and observing how they do business. This shows the con of
a nuclear powered sub, with the skipper peering into a periscope.
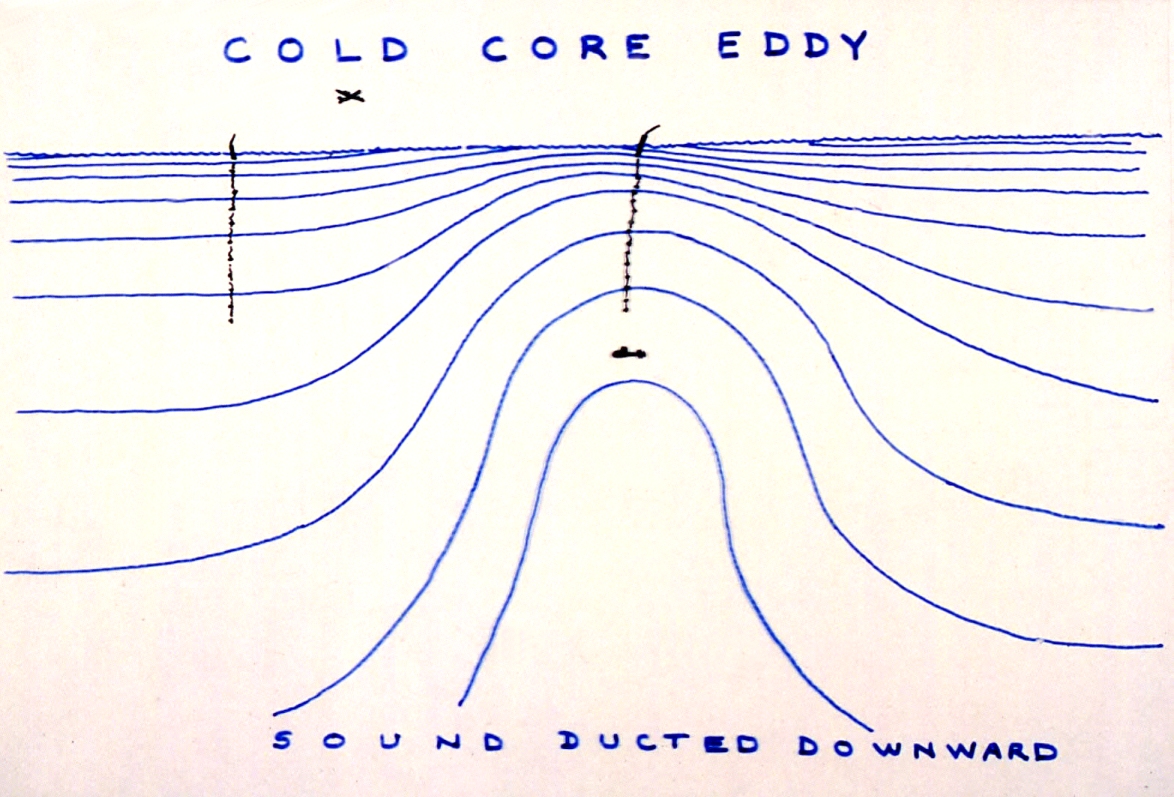
Large subaqueous eddies tend to form along mixing zones between converging
oceanic currents. There is no better environment for a submarine
to evade detection. Cold core eddies tend to duct sound downward,
making acoustic detection very difficult.
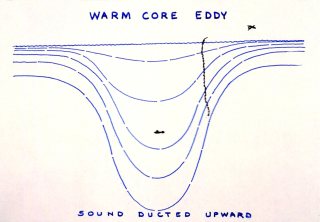
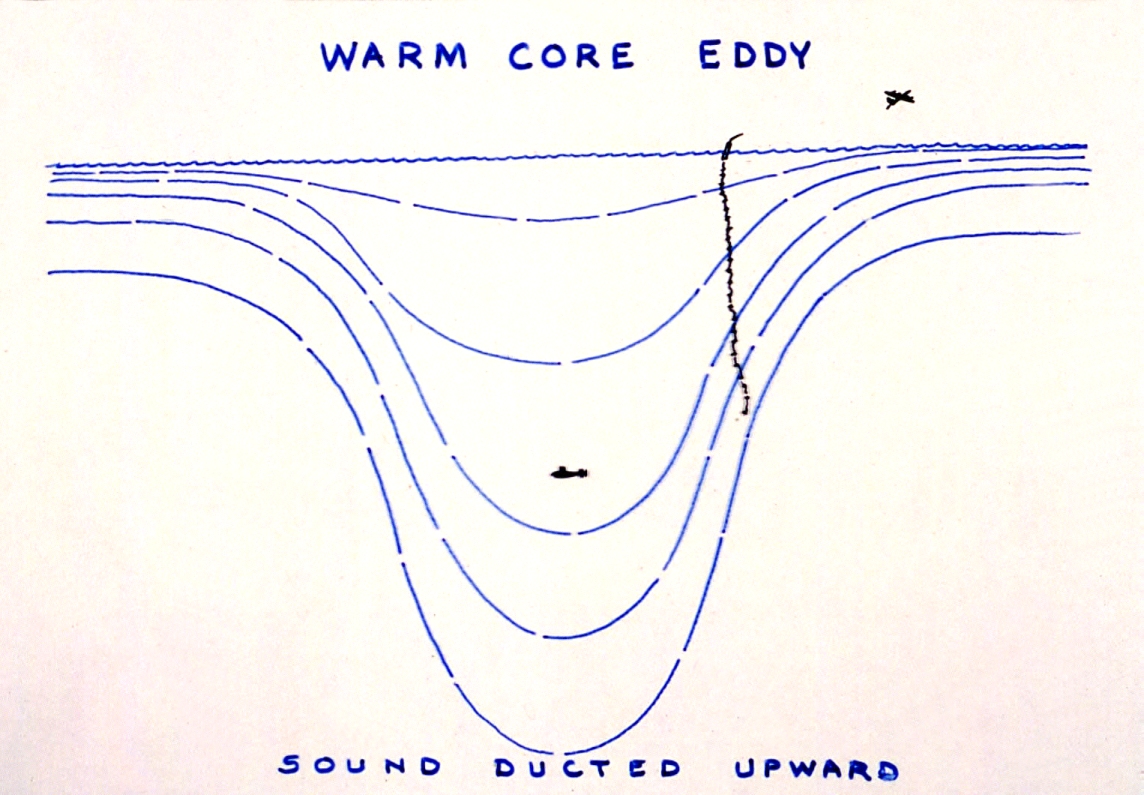
Warm core eddies duct sound upward, so are less desirous locales for
a submarine to loiter if they suspect they are being tracked.
Some of the larger eddies can be traced for upwards of a year across
the north Pacific.
Questions
or comments on this page?
E-mail Dr. J David Rogers at rogersda@mst.edu.

|